
Runtime Art on an Always On Computer

The flatness problem: why most PFPs can't tell a story
And why Tabor Robak's Human Resources is something different.

We Don’t Need More Collectors. We Need Better Patrons.
One of the quiet downsides of blockchains (especially in the context of art) is how good they are at making transactions easy. This sounds like praise, and often it is framed that way. Frictionless markets. Global access. Instant liquidity. No gatekeepers. All true... And also deeply consequential in ways the NFT space hasn’t fully reckoned with. Historically, art didn’t become valuable because it was easy to buy. 𝑰𝒕 𝒃𝒆𝒄𝒂𝒎𝒆 𝒗𝒂𝒍𝒖𝒂𝒃𝒍𝒆 𝒃𝒆𝒄𝒂𝒖𝒔𝒆 𝒎𝒆𝒂𝒏𝒊𝒏𝒈 𝒂𝒄𝒄𝒖𝒎𝒖𝒍...
A crypto-native stream of consciousness. This is where generative art meets macro memes. Where JPEGs aren’t just collectibles, but cultural artefacts. Where Bitcoin, Ethereum, Solana are more than chains, they're aesthetics. Expect reflections on PFPs as semiotic language, on-chain identity, Avant-Gay movements on Solana, Bitcoin as a medium for minimalism, and how protocols shape people. It’s also where degen instincts collide with critical thinking. Trading notes, tokenomics breakdowns, market cycles and morning musings about why memecoins might actually be religion in disguise. If you’re here, you probably know what “Ordinal” means, and you’ve already survived one bear market. Written in my voice. Sometimes coherent. Often not. Always sincere.
Support Ramblings of a Degen by SonOfLasG

What Does a Machine Know When It “Sees”? Blind Camera as Epistemology Machine
Support Ramblings of a Degen by SonOfLasG
What Does a Machine Know When It “Sees”? Blind Camera as Epistemology Machine
Runtime Art on an Always On Computer
The flatness problem: why most PFPs can't tell a story
And why Tabor Robak's Human Resources is something different.
We Don’t Need More Collectors. We Need Better Patrons.
One of the quiet downsides of blockchains (especially in the context of art) is how good they are at making transactions easy. This sounds like praise, and often it is framed that way. Frictionless markets. Global access. Instant liquidity. No gatekeepers. All true... And also deeply consequential in ways the NFT space hasn’t fully reckoned with. Historically, art didn’t become valuable because it was easy to buy. 𝑰𝒕 𝒃𝒆𝒄𝒂𝒎𝒆 𝒗𝒂𝒍𝒖𝒂𝒃𝒍𝒆 𝒃𝒆𝒄𝒂𝒖𝒔𝒆 𝒎𝒆𝒂𝒏𝒊𝒏𝒈 𝒂𝒄𝒄𝒖𝒎𝒖𝒍...
A crypto-native stream of consciousness. This is where generative art meets macro memes. Where JPEGs aren’t just collectibles, but cultural artefacts. Where Bitcoin, Ethereum, Solana are more than chains, they're aesthetics. Expect reflections on PFPs as semiotic language, on-chain identity, Avant-Gay movements on Solana, Bitcoin as a medium for minimalism, and how protocols shape people. It’s also where degen instincts collide with critical thinking. Trading notes, tokenomics breakdowns, market cycles and morning musings about why memecoins might actually be religion in disguise. If you’re here, you probably know what “Ordinal” means, and you’ve already survived one bear market. Written in my voice. Sometimes coherent. Often not. Always sincere.

Subscribe to Ramblings of a Degen by SonOfLasG
Subscribe to Ramblings of a Degen by SonOfLasG
Share Dialog
Share Dialog
<100 subscribers
<100 subscribers
We usually assume that seeing is knowing.
If you can look at a thing clearly enough, you must understand it. The camera has long been our favoured accomplice in this illusion: a device that promises objectivity, precision and evidence. To photograph something is, culturally, to settle an argument.
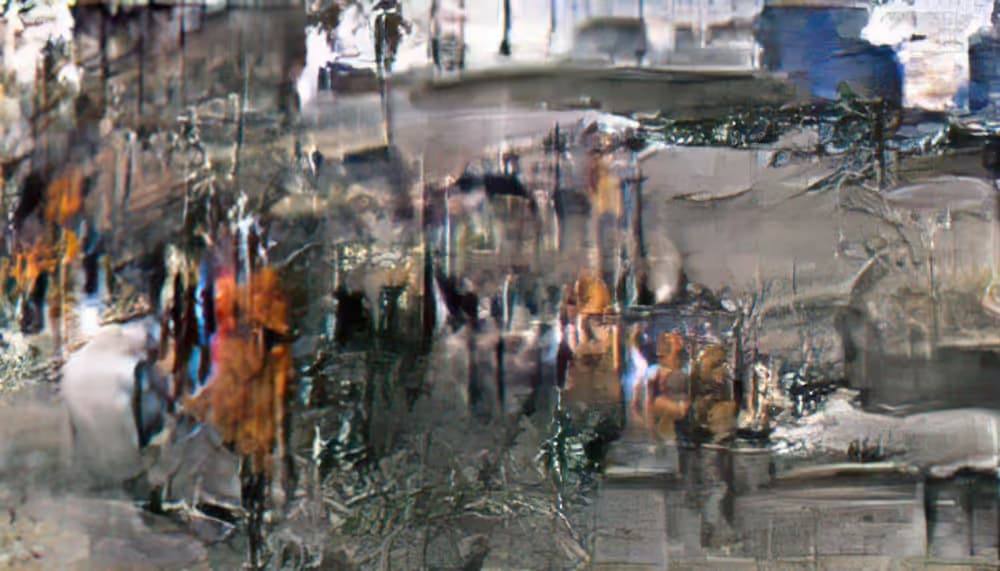
Diego Trujillo’s Blind Camera dismantles that assumption quietly but ruthlessly.
It is a camera that does not see light. It listens to sound. From that acoustic stream it produces an image. Not a record of the world, but a hypothesis about it. The picture is not evidence. It is a conjecture.
This is where the project becomes epistemological rather than aesthetic.
Blind Camera forces us to confront a simple, destabilising question:
If an image can be produced without sight, what exactly does an image know?
Knowing without seeing
Human perception is already inferential. We do not passively receive reality; we continuously predict it. Your brain fills in blind spots, smooths noise, and guesses what must be there based on context.
Blind Camera makes that logic explicit... and alien.
The machine does not “observe” Mexico City. It correlates sound patterns with visual patterns learned from a curated dataset. When it hears a metro rumble, it does not remember a specific station; it activates a statistical map of what “metro-like sound” has usually accompanied in its past training.
The resulting image is therefore not representation but probabilistic knowledge made visible.
This reframes the project as a test case for a larger philosophical problem:
If knowledge can be generated without direct sensory access, then “seeing” is no longer a privileged path to truth. It is merely one strategy among others.
Blind Camera asks:
Could hearing, memory, or pattern prediction be just as valid a basis for knowing?

Bias as a theory of the world
Most AI discourse treats bias as a failure to be corrected. Trujillo treats bias as a worldview.
He refuses global datasets and instead trains his system only on Mexico City. The machine is provincial by design. It does not aim for universality; it aims for situated understanding.
Epistemologically, this is radical.
Modern science typically aspires to a view from nowhere. Knowledge that is detached, universal, and context-free. Blind Camera suggests the opposite: that knowledge might be most meaningful when it is rooted in a place.
If the device hears a Paris metro but still imagines Mexico City, that is not ignorance. It is commitment to a prior framework of understanding. The machine “believes” in Mexico City the way a human might believe in a home culture.
The deeper question this raises is brutal and fascinating:
Is knowledge better when it is universal, or when it is partial but deeply embedded?
Blind Camera sides with the latter.
What does a machine “understand”?
Trujillo openly admits that his neural network is “a very stupid audience.” It does not know meaning, symbols, or causality. It processes pixels and sound as numerical patterns.
Yet it still produces images that feel meaningful.
This creates an epistemic paradox.
We are tempted to say the machine understands nothing. But its outputs are not random; they carry structure, consistency, and recognisable city like features.
So what kind of knowing is this?
Not human understanding.
Not factual knowledge.
Something closer to embodied statistical intuition.
Blind Camera suggests that intelligence might not require consciousness or semantics... only a dense web of correlations shaped by experience.
If that is true, then the line between “knowing” and “pattern matching” becomes disturbingly thin.
Truth without representation
Traditional photography rests on a realist epistemology: the image is presumed to correspond to the world. Even if imperfect, it claims to refer to something that existed.
Blind Camera rejects that contract.
Its images do not refer to what was there. They refer to how the machine has learned to expect the world to behave.
Yet many viewers still feel that the images are “true” to Mexico City... not literally, but atmospherically. The chaos, density and self regulating disorder come through.
This suggests a different kind of truth:
Not correspondence truth (“this is what the city looks like”),
but resonance truth (“this is what the city feels like to this system”).
Epistemologically, that is profound. It implies that some truths are not visual facts but relational patterns. Ways of being in the world rather than snapshots of it.
Making media for machines
One of the project’s most unsettling insights is that Trujillo was not filming for humans... he was filming for an algorithm.
This reverses a centuries old assumption: that media is made for human interpretation.
Here, the human must anticipate how a nonhuman intelligence will parse reality. He had to structure skies, streets, and sound sources not for aesthetic clarity, but for algorithmic legibility.
This forces a new epistemic humility:
Humans are no longer the sole arbiters of meaning in images. Machines are becoming part of the audience.
The question becomes:
What happens to knowledge when it must satisfy both human and machinic criteria?
Blind Camera does not answer this. It stages it.

Where does knowing happen?
Alejandro’s states that the art is not the button press but everything that led up to it. This has an epistemic corollary:
The knowledge is not in the image.
It is in the system that produces images.
Blind Camera relocates truth from output to infrastructure.
If you want to “understand” the work, staring at the prints is insufficient. You must understand the dataset, the training process, the constraints, the locality, the recording practices, and the machine’s limitations.
In other words, knowing shifts from what you see to how knowing was constructed.
This is a deep break from classical visual epistemology.
Knowledge as translation, not capture
Photography historically claimed to capture reality. Blind Camera treats reality as something to be translated across incompatible media: sound into image, place into pattern, experience into data.
Translation always distorts... but distortion can reveal structures that direct capture hides.
Blind Camera suggests that understanding may require productive mistranslation rather than perfect fidelity.
Knowledge, in this frame, is not accumulation of accurate pictures but refinement of interpretive systems.

What this means for “truth” in the age of AI
Blind Camera does not argue that AI images are true or false.
It proposes something stranger:
That truth might be a property of relationships between systems (human, machine, city) rather than a property of images themselves.
If a machine trained only on Mexico City can generate images that feel true to the city, then truth is not located in pixels but in alignment between experience, data and interpretation.
This destabilises both naïve realism and cynical relativism.
It is neither “everything is fake” nor “the camera never lies.”
It is: truth is mediated, negotiated and system dependent.
The final epistemic question
Blind Camera leaves us with a problem we cannot easily resolve:
If a machine can “know” a city without seeing it,
and humans can “recognise” that knowledge as meaningful,
then what, exactly, is knowing?
Is it:
👉🏾 visual accuracy?
👉🏾 statistical coherence?
👉🏾 experiential resonance?
👉🏾 cultural belonging?
👉🏾 or something else entirely?
Trujillo does not close the question. He opens it.
And that, ultimately, is why this project matters.
It is not just an artwork.
It is a laboratory for thinking about perception, bias, truth, and the future of knowledge in a world where machines also “see.”
We usually assume that seeing is knowing.
If you can look at a thing clearly enough, you must understand it. The camera has long been our favoured accomplice in this illusion: a device that promises objectivity, precision and evidence. To photograph something is, culturally, to settle an argument.
Diego Trujillo’s Blind Camera dismantles that assumption quietly but ruthlessly.
It is a camera that does not see light. It listens to sound. From that acoustic stream it produces an image. Not a record of the world, but a hypothesis about it. The picture is not evidence. It is a conjecture.
This is where the project becomes epistemological rather than aesthetic.
Blind Camera forces us to confront a simple, destabilising question:
If an image can be produced without sight, what exactly does an image know?
Knowing without seeing
Human perception is already inferential. We do not passively receive reality; we continuously predict it. Your brain fills in blind spots, smooths noise, and guesses what must be there based on context.
Blind Camera makes that logic explicit... and alien.
The machine does not “observe” Mexico City. It correlates sound patterns with visual patterns learned from a curated dataset. When it hears a metro rumble, it does not remember a specific station; it activates a statistical map of what “metro-like sound” has usually accompanied in its past training.
The resulting image is therefore not representation but probabilistic knowledge made visible.
This reframes the project as a test case for a larger philosophical problem:
If knowledge can be generated without direct sensory access, then “seeing” is no longer a privileged path to truth. It is merely one strategy among others.
Blind Camera asks:
Could hearing, memory, or pattern prediction be just as valid a basis for knowing?
Bias as a theory of the world
Most AI discourse treats bias as a failure to be corrected. Trujillo treats bias as a worldview.
He refuses global datasets and instead trains his system only on Mexico City. The machine is provincial by design. It does not aim for universality; it aims for situated understanding.
Epistemologically, this is radical.
Modern science typically aspires to a view from nowhere. Knowledge that is detached, universal, and context-free. Blind Camera suggests the opposite: that knowledge might be most meaningful when it is rooted in a place.
If the device hears a Paris metro but still imagines Mexico City, that is not ignorance. It is commitment to a prior framework of understanding. The machine “believes” in Mexico City the way a human might believe in a home culture.
The deeper question this raises is brutal and fascinating:
Is knowledge better when it is universal, or when it is partial but deeply embedded?
Blind Camera sides with the latter.
What does a machine “understand”?
Trujillo openly admits that his neural network is “a very stupid audience.” It does not know meaning, symbols, or causality. It processes pixels and sound as numerical patterns.
Yet it still produces images that feel meaningful.
This creates an epistemic paradox.
We are tempted to say the machine understands nothing. But its outputs are not random; they carry structure, consistency, and recognisable city like features.
So what kind of knowing is this?
Not human understanding.
Not factual knowledge.
Something closer to embodied statistical intuition.
Blind Camera suggests that intelligence might not require consciousness or semantics... only a dense web of correlations shaped by experience.
If that is true, then the line between “knowing” and “pattern matching” becomes disturbingly thin.
Truth without representation
Traditional photography rests on a realist epistemology: the image is presumed to correspond to the world. Even if imperfect, it claims to refer to something that existed.
Blind Camera rejects that contract.
Its images do not refer to what was there. They refer to how the machine has learned to expect the world to behave.
Yet many viewers still feel that the images are “true” to Mexico City... not literally, but atmospherically. The chaos, density and self regulating disorder come through.
This suggests a different kind of truth:
Not correspondence truth (“this is what the city looks like”),
but resonance truth (“this is what the city feels like to this system”).
Epistemologically, that is profound. It implies that some truths are not visual facts but relational patterns. Ways of being in the world rather than snapshots of it.
Making media for machines
One of the project’s most unsettling insights is that Trujillo was not filming for humans... he was filming for an algorithm.
This reverses a centuries old assumption: that media is made for human interpretation.
Here, the human must anticipate how a nonhuman intelligence will parse reality. He had to structure skies, streets, and sound sources not for aesthetic clarity, but for algorithmic legibility.
This forces a new epistemic humility:
Humans are no longer the sole arbiters of meaning in images. Machines are becoming part of the audience.
The question becomes:
What happens to knowledge when it must satisfy both human and machinic criteria?
Blind Camera does not answer this. It stages it.
Where does knowing happen?
Alejandro’s states that the art is not the button press but everything that led up to it. This has an epistemic corollary:
The knowledge is not in the image.
It is in the system that produces images.
Blind Camera relocates truth from output to infrastructure.
If you want to “understand” the work, staring at the prints is insufficient. You must understand the dataset, the training process, the constraints, the locality, the recording practices, and the machine’s limitations.
In other words, knowing shifts from what you see to how knowing was constructed.
This is a deep break from classical visual epistemology.
Knowledge as translation, not capture
Photography historically claimed to capture reality. Blind Camera treats reality as something to be translated across incompatible media: sound into image, place into pattern, experience into data.
Translation always distorts... but distortion can reveal structures that direct capture hides.
Blind Camera suggests that understanding may require productive mistranslation rather than perfect fidelity.
Knowledge, in this frame, is not accumulation of accurate pictures but refinement of interpretive systems.
What this means for “truth” in the age of AI
Blind Camera does not argue that AI images are true or false.
It proposes something stranger:
That truth might be a property of relationships between systems (human, machine, city) rather than a property of images themselves.
If a machine trained only on Mexico City can generate images that feel true to the city, then truth is not located in pixels but in alignment between experience, data and interpretation.
This destabilises both naïve realism and cynical relativism.
It is neither “everything is fake” nor “the camera never lies.”
It is: truth is mediated, negotiated and system dependent.
The final epistemic question
Blind Camera leaves us with a problem we cannot easily resolve:
If a machine can “know” a city without seeing it,
and humans can “recognise” that knowledge as meaningful,
then what, exactly, is knowing?
Is it:
👉🏾 visual accuracy?
👉🏾 statistical coherence?
👉🏾 experiential resonance?
👉🏾 cultural belonging?
👉🏾 or something else entirely?
Trujillo does not close the question. He opens it.
And that, ultimately, is why this project matters.
It is not just an artwork.
It is a laboratory for thinking about perception, bias, truth, and the future of knowledge in a world where machines also “see.”



No activity yet